Autonomous Robotic Information Gathering Systems
 2025-10-15 8 min read
2025-10-15 8 min read Overview
Robotic Information Gathering (RIG) is a process of optimizing an information-theoretic metric from efficient exploration of a region of interest by robots with motion constraints while considering inferences from a probabilistic model within a limited mission time. Effective data collection in collaborative information-gathering systems relies heavily on maintaining uninterrupted connectivity. Yet, real-world communication disruptions often pose challenges to information-gathering processes.
The Challenge
One of the key challenges in multi-robot information gathering is maintaining reliable communication while exploring unknown environments. Our research focuses on developing decentralized systems that can operate even with limited communication bandwidth.
We introduce a novel method: a limited communication decentralized information-gathering system for multiple robots to explore environmental phenomena characterized as unknown spatial fields. Our method leverages quadtree structures to ensure comprehensive workspace coverage and efficient exploration.
3 Robots Setup
Our experimental setup utilizes three robots working in concert to gather spatial data. The robots coordinate their movements to optimize information gain while respecting communication constraints.

Robot Configuration
- Coordinated autonomous navigation
- Decentralized decision making
- Quadtree-based workspace partitioning
Exploration Pattern
- Systematic coverage of region of interest
- Adaptive exploration based on sensor data
- Real-time communication protocols
Temperature Rig
One of our primary experimental testbeds is the Temperature Rig, deployed at Florida International University. This system demonstrates the RIG methodology in a real-world environmental monitoring scenario.
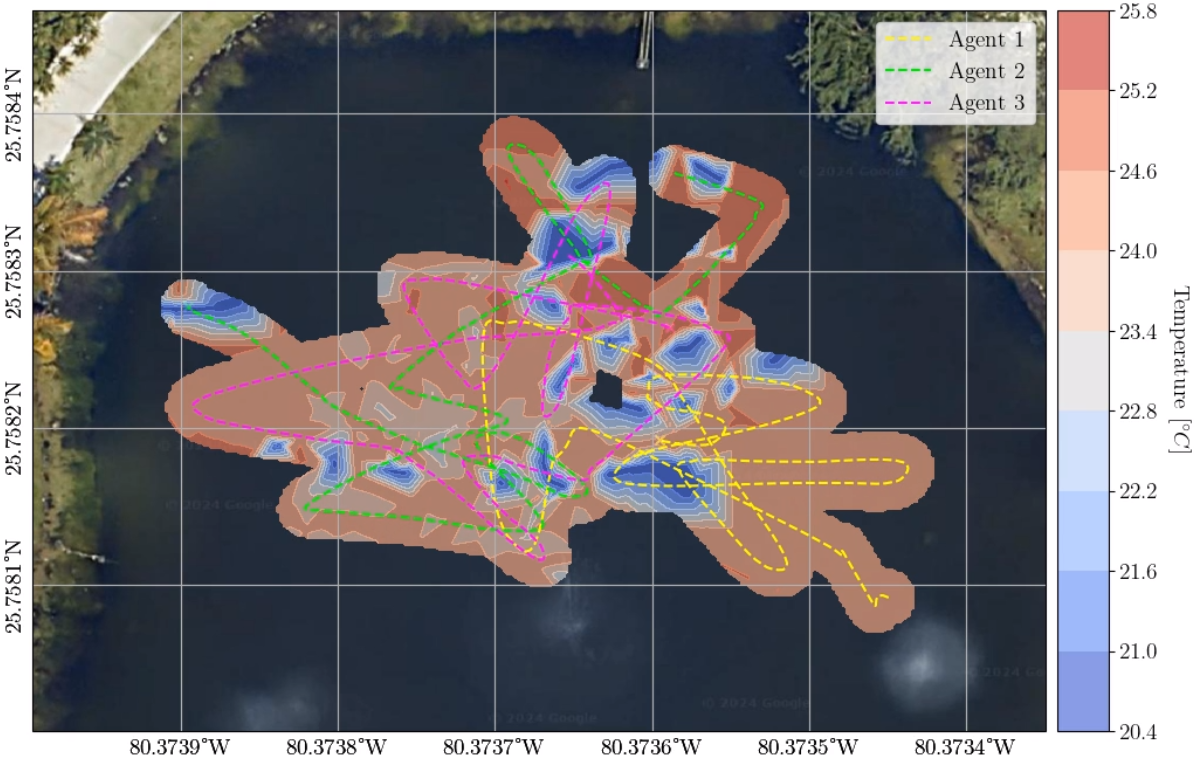
Data Collection
Three robots collect temperature data across a geographic area, building a spatial temperature map in real-time. The system maintains decentralized operation while coordinating through limited communication channels.
Key Results
- Efficient coverage of large areas
- Accurate temperature field estimation
- Robust performance despite communication disruptions
Watch Video
Technologies & Tools
Our research leverages several key technologies and frameworks:
- Python: Primary development language
- Scikit-Learn: Machine learning algorithms
- Gaussian Processes: Probabilistic modeling of spatial fields
- ROS (Robot Operating System): Robot communication and control
- SearRobot: Custom robot platform
- Surveyor ASV: Autonomous surface vehicle platform
Technical Approach
Information-Theoretic Optimization
We use information theory metrics to drive robot exploration decisions, maximizing the reduction in uncertainty about the environmental field being observed.
Decentralized Control
Rather than relying on a central planner, each robot makes decisions based on local information and limited communication with neighbors.
Gaussian Processes
Gaussian process models provide probabilistic estimates of the spatial field, allowing us to quantify uncertainty and guide exploration accordingly.
Results and Applications
The RIG methodology has applications across multiple domains:
- Environmental Monitoring: Temperature, humidity, pollution mapping
- Agricultural Sensing: Soil moisture, nutrient distribution mapping
- Disaster Response: Radiation, contamination mapping in hazardous areas
- Ocean Monitoring: Autonomous surface vehicles for oceanographic research
Conclusion
Autonomous Robotic Information Gathering Systems represent an important advancement in collaborative robotics and environmental sensing. By combining decentralized control, information-theoretic optimization, and probabilistic modeling, we enable robots to efficiently explore and map complex environmental phenomena even in the face of communication constraints.
This research opens doors for autonomous systems to tackle real-world monitoring and exploration challenges across diverse application domains.