Localization in Sensory-Compromised Environments using Environmental PDEs
 2026-03-31 8 min read
2026-03-31 8 min read Overview
In many marine and underwater environments, traditional localization methods like GPS are often unavailable or unreliable. We proposed a localization framework that utilizes spatiotemporal fields—governed by Partial Differential Equations (PDEs)—as unique localization signatures. This research forms a core component of my work on localization in sensory-compromised scenarios.
By using a numerical PDE solver to provide predicted fields over a domain, we can treat environmental features like temperature or salinity as a map for navigation. This allows autonomous vehicles to determine their position by matching real-time sensor readings against these predicted multimodal "landmarks."
The Challenge
Navigating in open water or coastal environments presents significant technical hurdles:
- Featureless Environments: Traditional visual or LiDAR-based SLAM often fails in open water where there are no distinct structural landmarks.
- Sensor Drift: Real-world sensors suffer from inherent drift, which can quickly lead to catastrophic localization errors if not accounted for.
- Computational Complexity: Running high-fidelity PDE solvers alongside complex filtering algorithms in real-time requires efficient mathematical partitioning.
Technologies & Tools
This framework integrates advanced numerical methods with robotic filtering techniques:
- Numerical PDE Solvers: Used to model Shallow Water Equations and Advection-Diffusion equations.
- Rao-Blackwellized Particle Filter (RBPF): A sophisticated filtering technique that reduces the computational load by partitioning the vehicle state.
- Multimodal Sensing: Fusing data from salinity, temperature, and dissolved oxygen sensors.
- Autonomous Surface Vehicles (ASV): The primary hardware platform for field validation.
Technical Approach
Rao-Blackwellized Particle Filter (RBPF)
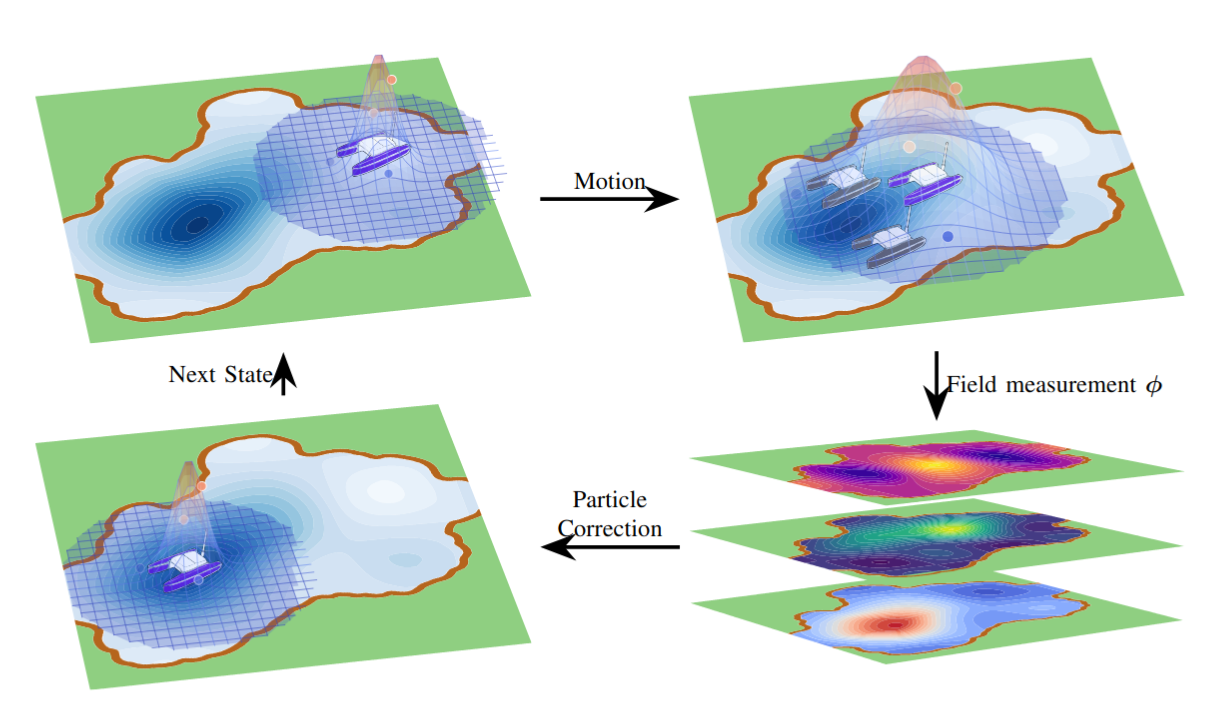
To address the high dimensionality of the localization problem, we utilize a factorization approach. The vehicle state is partitioned into a nonlinear component (sampled by particles) and a linear sensor bias component (tracked analytically via per-particle Kalman filters). This partitioning significantly reduces the number of particles required for accurate localization compared to a standard particle filter, making it viable for real-time deployment.
A conceptual overview of this localization process, illustrating how the filtering is structured to manage environmental PDE maps and multimodal measurements, is shown in Figure 1.
PDE-Governed Signatures
We consider two primary classes of PDEs to create our "environmental maps":
- Shallow Water Equations (SWE): Describing free-surface flows in coastal and riverine environments.
- Advection-Diffusion Equations: Modeling the transport and mixing of scalar quantities like temperature, salinity, and dissolved oxygen.
Field Experiments & Results
The framework was validated through both simulation studies and field experiments using an ASV. My ongoing work with the Florida Department of Environmental Protection (FDEP) in Biscayne Bay provided a perfect real-world testbed for these methods.
Key Findings
- Improved Accuracy: The RBPF consistently outperformed standard particle filters in terms of final position error and Root Mean Square Error (RMSE).
- Spatial Variability: Field data confirmed that environmental fields (salinity, temperature, and dissolved oxygen) provide sufficient spatial variability to serve as reliable localization signatures.
- Robustness: The system remained effective even when accounting for realistic sensor drift over extended missions.
Experimental Videos
Below are video demonstrations of the localization framework applied to the two primary PDE scenarios.
Scenario 1: Shallow Water Equations (SWE)
This scenario demonstrates the framework's performance using features derived from free-surface flow models, typical in coastal and riverine settings.
Scenario 2: Advection-Diffusion Equation
This scenario showcases localization performance by tracking the transport and mixing of scalar environmental fields like temperature and salinity.
Conclusion
By treating the environment itself as a source of information through the lens of physics-based models, we can enable autonomous vehicles to navigate safely in "blind" conditions. This framework provides a robust path forward for long-term autonomy in marine environments where traditional sensing modalities fail.
This research is a key milestone in augmenting agent autonomy in marine environments and will be further detailed in my upcoming Ph.D. dissertation.